AI for Autonomous Lane Change
This project was done during my time at Honda and was part of a vision to empower people to travel freely and enjoy the experience of being on roads, irrespective of their individual driving skills and capabilities

Part A: Pain point identification
User surveys and interviews reveal lane change or merging on roads is a challenging task according to many drivers and therefore our decided to take up this challenge.

These maneuvers are often associated with feelings of anxiety and tediousness. Autonomous driving can thus be a solution to address this problem by taking out the stress and still creating the experience personalized.
Part B: System Architecture Design


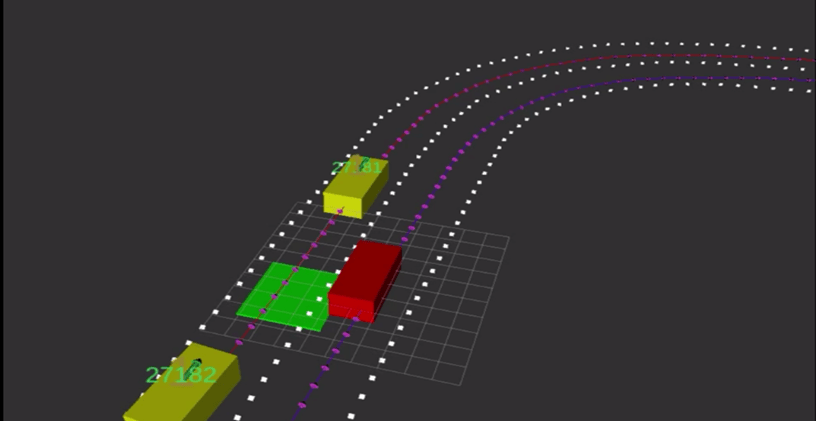
While the perception and communication interface have standard setups, for motion planning we need to make the movement and decision making of the AI system both human and safe.
For developing this we needed to first understand the way in which humans interact with their surroundings to negotiate a lane change.
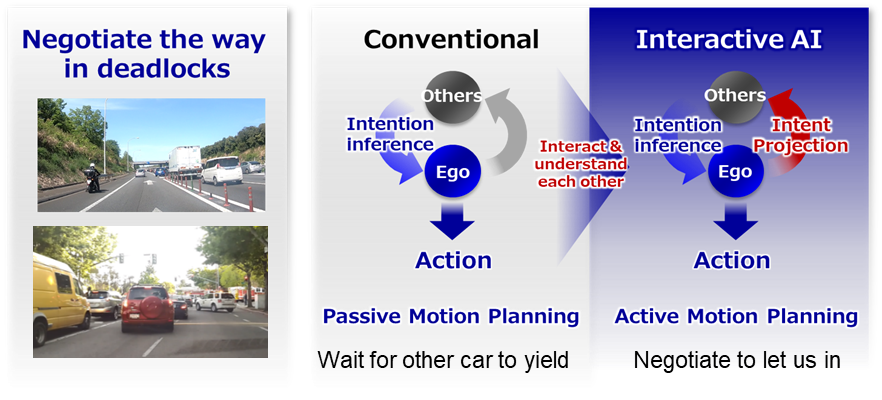
We thus developed a system that would both project intent by its maneuvers and infer intent from the state variables by using machine learning.

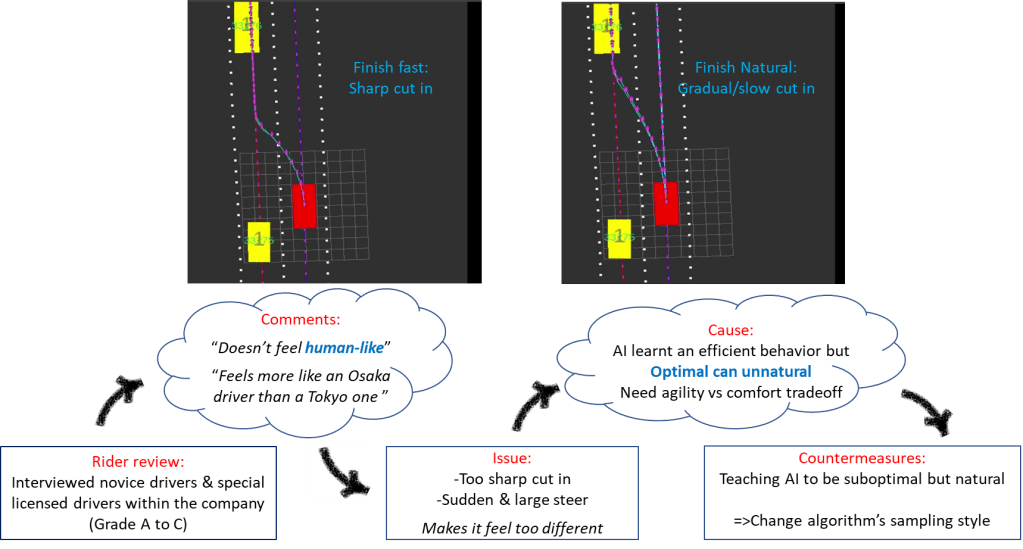
Part C: Human Centric Adaption
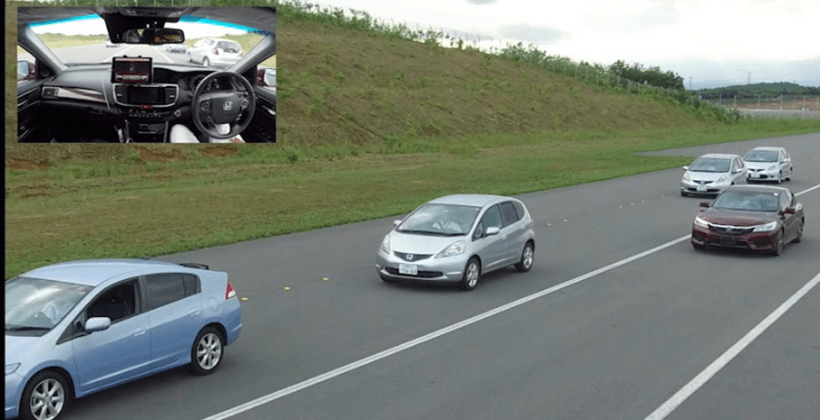
The final step was to make the solution feel human and “natural”, we had to conduct tests and take feedbacks from test riders about factors like comfort. We then converted those qualitative feedbacks into quantifiable objectives and iterated in actual test vehicles.
The project won the company’s “Best Project Demo Award” and is being further developed to tackle wider state complexities.
